

Sistema de visión: cabina y técnica de iluminación adecuada para células robóticas

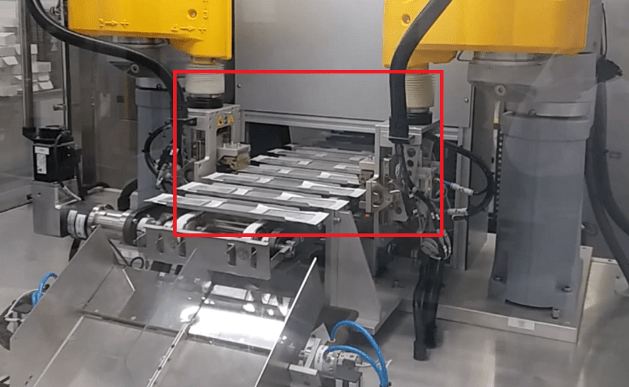
Los sistemas de visión a menudo se usan en células robóticas para guiar a los robots con coordenadas de producto. Sin embargo, estos equipos tienen un gran potencial para agregar más valor a la aplicación: evaluar dimensiones, presencia / ausencia de cualquier detalle, puntos de colisión con la garra del robot debido a la proximidad de los productos, entre otras posibilidades. Durante el estudio de la aplicación, es esencial que el integrador de sistemas esté informado sobre los controles de calidad (inspecciones) adoptados por la industria, ya que todo influye directamente en el diseño de la cabina, la elección de la mejor técnica de iluminación y la programación de la cámara.
1. Técnica de cabina e iluminación
1.1. Cabina
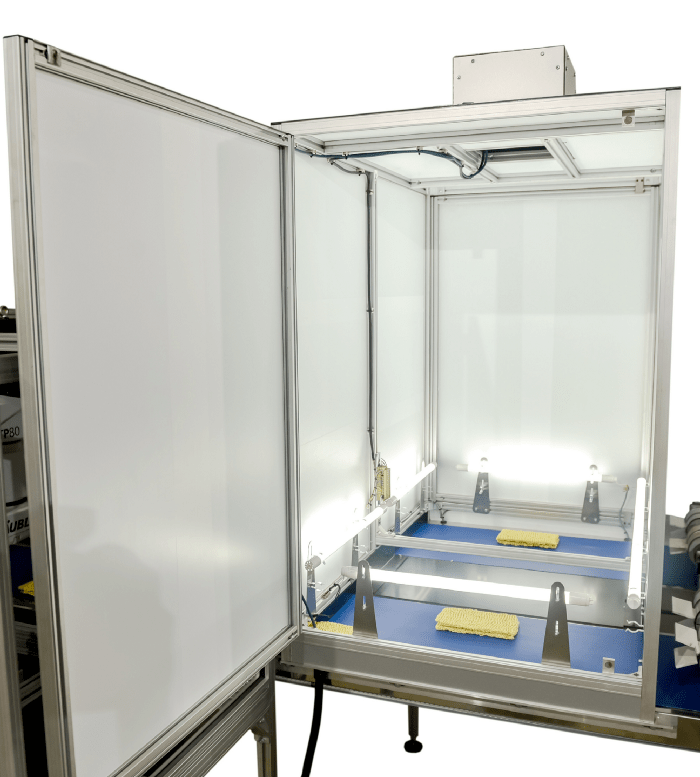
Una cabina bien diseñada es esencial para garantizar una iluminación eficiente. Cabina + iluminación constante es un factor determinante para un sistema de visión estable. Un factor que compromete la repetibilidad del sistema de visión es la interferencia de la luz externa: el medio ambiente puede emitir rayos UV. La estructura de la cabina debe estar diseñada para eliminar esta interferencia.
Cabina sin valla y con interferencia de luz externa
Cabina sellada sin interferencia de luz externa
1.2. Técnica de iluminación
La técnica de iluminación se define después del análisis del producto y sus variaciones y la inspección de calidad requerida por el cliente. Es común encontrar sistemas de visión que son inestables y requieren ajustes de parámetros constantes. Esta inestabilidad generalmente es causada por la ausencia de una cabina y el uso de una técnica de iluminación incorrecta.
Iluminación directa: menos adecuada para el producto
Iluminación de la luz de fondo: técnica correcta para el producto
Con el análisis del producto y un buen conjunto de cabina / iluminación, es posible aplicar las más variadas herramientas de inspección. El know-how del integrador es el factor principal para un sistema de visión estable que agregará valor a la automatización del proceso.

Cabina cerrada con luz de fondo infrarroja

Cabina cerrada con luz directa en ángulo
Cabina cerrada con luz indirecta, paredes y techo blanco mate
2. Ejemplos de inspección
Las pruebas son fundamentales para validar conceptos y, cuando se validan, pueden aportar resultados significativos a la calidad del proceso. Algunos resultados expresivos que SNEF Brasil ya ha aplicado en sus proyectos:
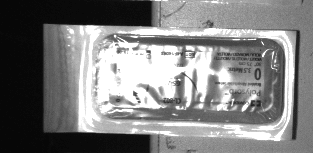
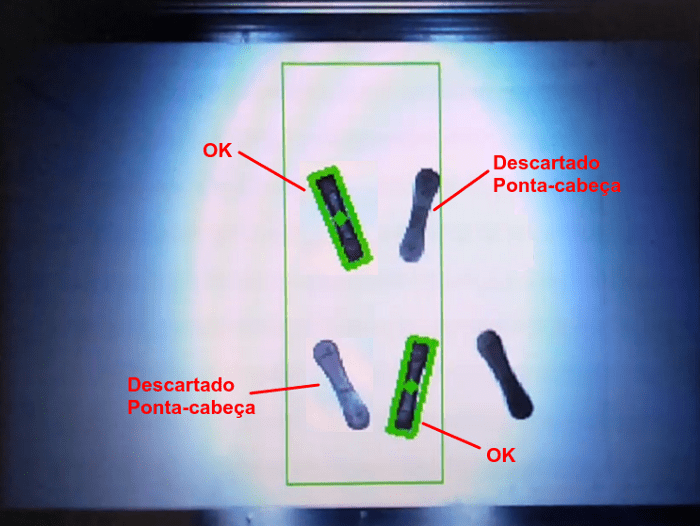
2.1. Inspección de calidad en sobres de agujas de sutura
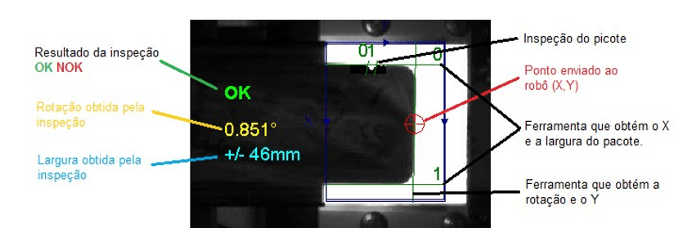
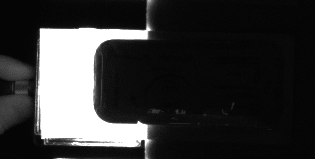
Grados de rotación para evitar colisiones entre la garra y la correa, presencia / ausencia de perforación, medición del ancho de la envoltura y coordenadas del punto en el que el robot sellará el producto (sellado térmico). < / p>
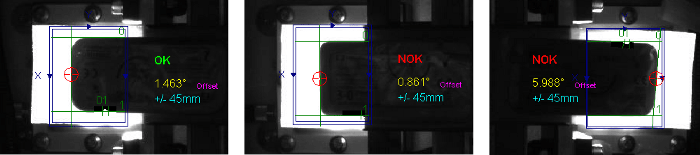
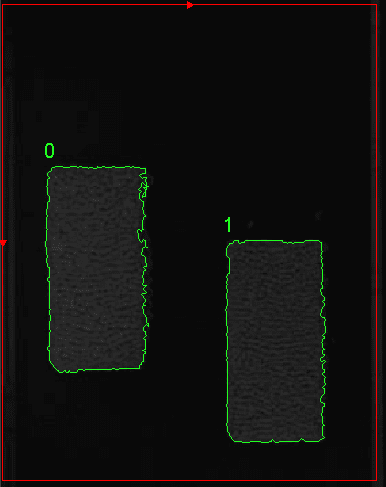
Imagen 1- Inspección OK para cumplir con los requisitos
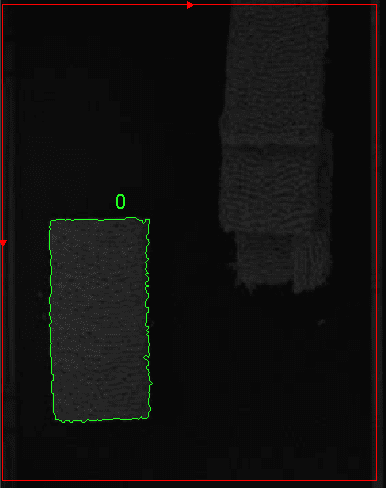
Imagen 2 - Inspección NOK debido a la ausencia de perforación
Imagen 3 - Inspección NOK por grado - Colisión de garra / pista
2.2. Inspección de chocolate
El objetivo es que los robots no manejen los chocolates que están boca abajo o rotos, etc. El consumidor abrirá la caja del producto y todos los chocolates estarán sanos y en la misma posición.
Garantizamos la excelencia del producto final en la inspección del sistema de visión
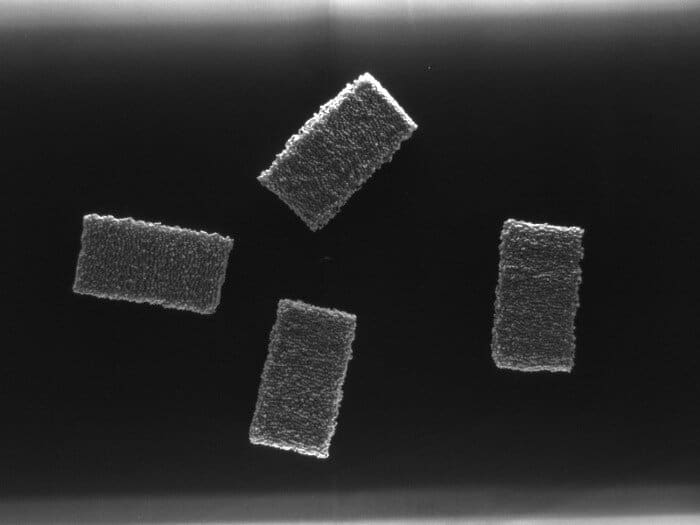
2.3. Evite la colisión en el manejo de la pasta
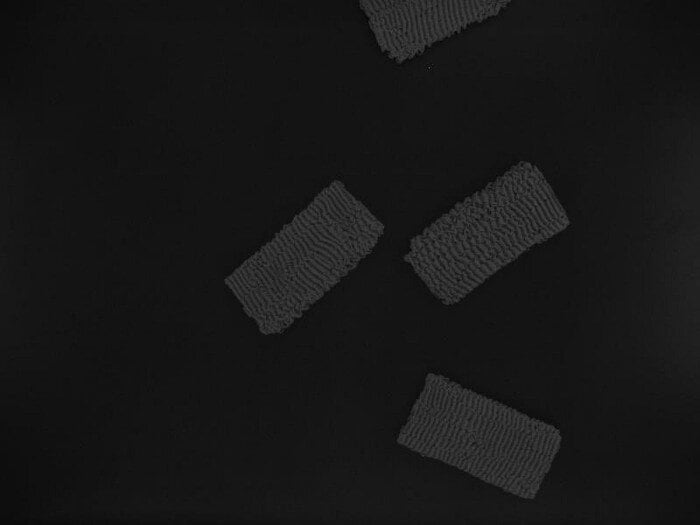
La placa de fideos instantáneos es un producto muy rígido y, con el tiempo, la garra puede dañarse debido a numerosas colisiones. Además, puede ser que el producto no sea adecuado para su manipulación (roto o mal apilado).
Productos aceptables y manipulables
Producto manipulado y producto NOK, mal apilados, rotos y con puntos de colisión con la garra
3. Desafíos
Una buena comprensión del proceso de producción, las pruebas con el producto, el diseño de la cabina y la definición de las mejores técnicas / herramientas a aplicar es esencial para el éxito de la automatización de un proceso. La experiencia del integrador es un elemento fundamental en el desarrollo de la tecnología necesaria para extraer el máximo del sistema de visión en su célula robótica. Es una tarea compleja, sin embargo, SNEF Brasil cuenta con un personal técnico capacitado para desarrollar celdas robóticas con sistemas de visión robustos, dispositivos y procesos adaptados a la automatización de los más variados procesos de producción, asegurando la eficiencia, la estandarización y la productividad. Sistemas de visión con inspección de calidad en procesos robóticos.
 Soluciones
Soluciones26.06.2024
¡Descubre cómo Snef puede ayudarlo a mejorar la eficiencia de su planta!
¡Estamos emocionados de anunciar la adquisición de nuevas máquinas y equipos para mejorar la eficiencia de la planta de nuestros clientes! Este proceso es crucial para garantizar el cumplimiento y la eficiencia de una...
- Soluciones
10.04.2023
Proyectos de drenaje en parques fotovoltaicos.
Con la creciente inversión en proyectos e implementación de parques solares para la diversificación de matrices de energía, los desafíos también crecen. Los desafíos están en relación...
- Soluciones
10.02.2021
DELITOS CIBERNÉTICOS: UN MUNDO SITIADO
Para evitar el ciberdelito, las empresas deben estructurar sus áreas de seguridad de la información reforzando el monitoreo de la seguridad y la red.