

Vision System: Cabin and Lighting Technique Suitable for Robotic Cells

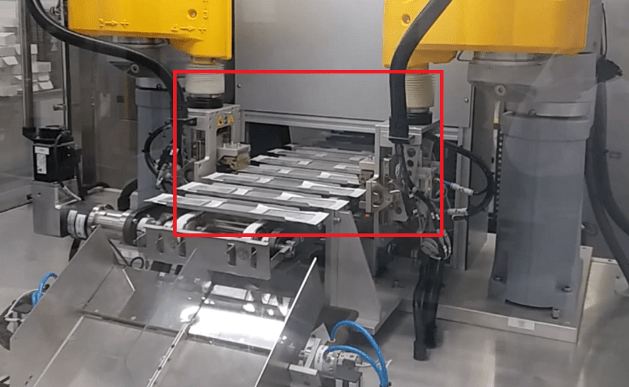
Vision systems are often used in robotic cells to guide robots with product coordinates. These equipments, however, have great potential to add more value to the application: evaluating dimensions, presence / absence of any detail, points of collision with the robot's claw due to the proximity of the products, among other possibilities. During the study of the application, it is essential that the systems integrator is informed about the quality controls (inspections) adopted by the industry, as everything directly influences the design of the cabin, choosing the best lighting technique and programming the camera.
1. Cabin and Lighting Technique
1.1. Cabin
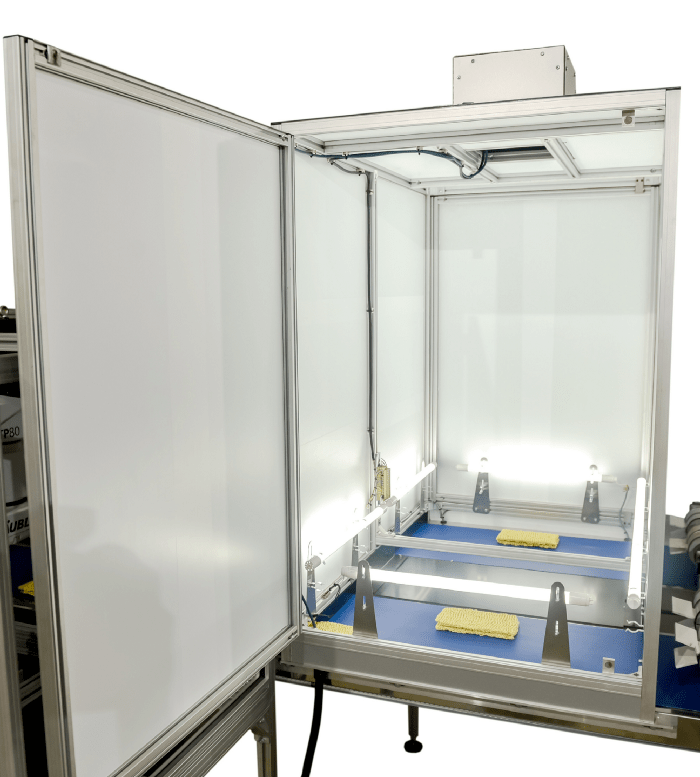
A well-designed cabin is essential to ensure efficient lighting. Cabin + constant lighting is a determining factor for a stable vision system. One factor that compromises the repeatability of the vision system is the interference of external light - UV rays can be emitted by the environment. The cabin structure must be designed to eliminate this interference.
Cabin without fence and with external light interference
Sealed cab without external light interference
1.2. Lighting Technique
The lighting technique is defined after analysis of the product and its variations and the quality inspection required by the customer. It is common to find vision systems that are unstable and require constant parameter adjustments. This instability is usually caused by the absence of a cabin and the use of the wrong lighting technique.
Direct lighting - less suitable for the product
Back Light lighting - correct technique for the product
With the product analysis and a good cabin / lighting set, it is possible to apply the most varied inspection tools. The know-how of the integrator is the main factor for a stable vision system that will add value to the automation of the process.

Closed cabin with BackLight InfraRed

Closed cabin with angled direct light
Closed cabin with indirect light, walls and matte white roof
2. Inspection Examples
Tests are fundamental to validate concepts and, when validated, can bring significant results to the quality of the process. Some expressive results that SNEF Brasil has already applied in its projects:
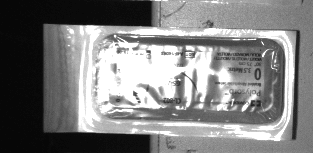
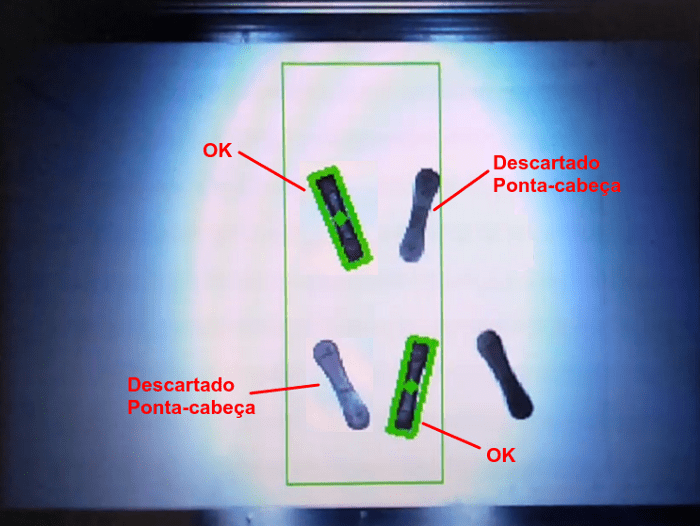
2.1. Quality Inspection on Suture Needle Envelopes
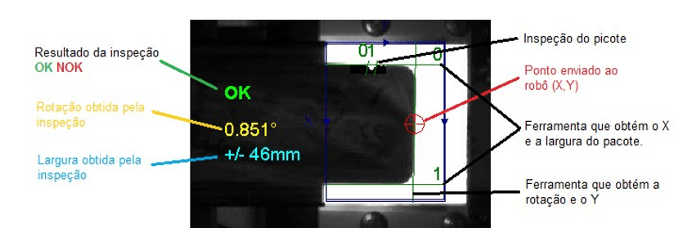
Degrees of rotation to avoid collision between claw and belt, presence / absence of perforation, measurement of envelope width and coordinate of the point at which the robot will seal the product (thermal sealing). < / p>
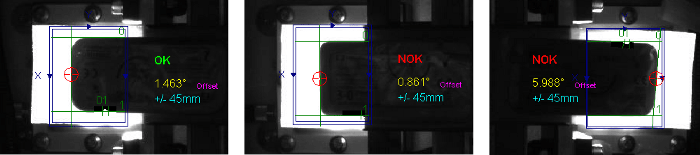
Image 1- Inspection OK for meeting the requirements
Image 2 - NOK inspection due to the absence of perforation
Image 3 - NOK inspection by degree - Claw / track collision
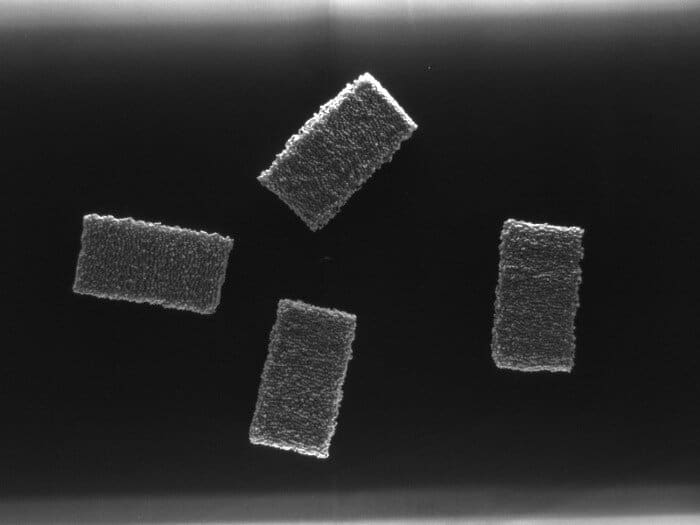
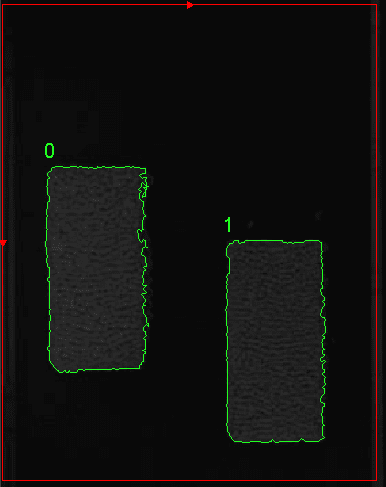
2.2. Chocolate Inspection
The goal is that robots do not manipulate chocolates that are upside down on the conveyor or broken, etc. The consumer will open the product box and all the chocolates will be healthy and in the same position.
We guarantee the excellence of the final product in the inspection of the vision system
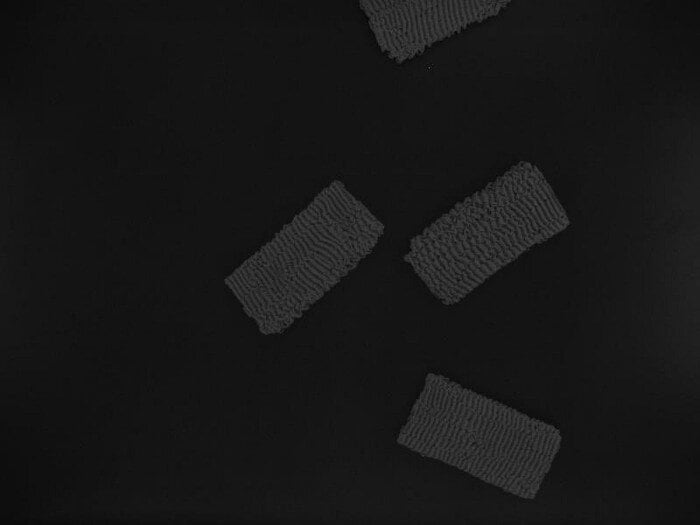
2.3. Avoid Collision in Pasta Handling
Instant noodle plate is a very rigid product and, over time, the claw can be damaged due to numerous collisions. In addition, it may be that the product is not suitable for handling (broken or poorly stacked).
OK and Manipulable Products
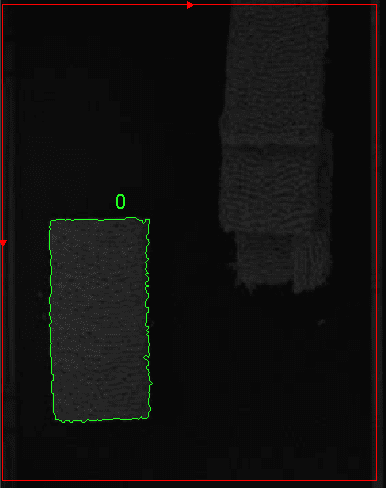
Manipulated product and NOK product, poorly stacked, broken and with points of collision with the claw
3. Challenges
A good understanding of the production process, tests with the product, cabin design and the definition of the best techniques / tools to be applied is essential for the success of automation of a process. The expertise of the integrator is a fundamental item in the development of the technology necessary to extract the maximum from the vision system in its robotic cell. It is a complex task, however SNEF Brasil has a trained technical staff to develop robotic cells with robust vision systems, devices and processes tailored to the automation of the most varied production processes, ensuring efficiency, standardization and productivity. Vision Systems with quality inspection in robotic processes.
 Solutions
Solutions2024.06.26
Find out how Snef can help you enhance the efficiency of your plant!
We are excited to announce the acquisition of new machines and equipment to enhance our customers' plant efficiency! and guarantee that systems, components or installations are functioning correctly and in accordance with the established...
- Solutions
2023.04.10
Drainage projects in photovoltaic parks.
with the growing investment in projects and implementation of solar parks for diversification of energy matrices, the challenges also grow. Challenges is in relation to drainage and rainwater management. So it is necessary to understand the...
- Solutions
2021.02.10
CYBER CRIMES - A SITIATED WORLD
To avoid cybercrime, companies must structure their information security areas by reinforcing network and security monitoring.