

Desarrollo de garras para soluciones robotizadas

La celda robótica es una de las opciones más efectivas para industrias que buscan una mayor productividad y una calidad mejorada. Entre los componentes, la garra del robot destaca por su versatilidad para manipular productos de los más variados tipos. La garra es como una "mano" para el robot: se desarrollan garras especiales para satisfacer las necesidades específicas del proceso / línea de producción.
El desarrollo de una garra depende del tipo de producto que se manipulará para aumentar la productividad. Cuanto mayor sea el número de piezas manipulables en la pinza, menor será el número de ciclos del robot, por lo que se le dejará más tiempo, atenuando sus esfuerzos físicos, aumentando su vida útil.
Lea también: Automação e Robotização - Fortalecimiento en tiempos de pandemia
MANEJO DE PRODUCTOS ALIMENTARIOS QUE SERÁN EMBALADOS
Para que un sistema reemplace una línea de manipulación manual en las industrias alimentarias, se tienen en cuenta la integridad del producto, los requisitos de calidad y la solución en su conjunto.

Figura 1 - Garra para manipular chocolate
En la Figura 1 podemos ver una solución integrada en la que se manipulará el chocolate para su envasado primario - blisters . La garra del robot tiene seis ventosas que recogen individualmente los productos. Los chocolates son seleccionados a través de un sistema de visión que le dice a los robots la posición de cada uno. El agarre del robot agarra producto por producto de forma independiente. La masa y la velocidad con la que actúa la garra también influyen en el rendimiento del robot, por lo que seleccionamos más ágiles y materiales más ligero como los polímeros y el aluminio, que cumplen con los requisitos de calidad.
Una pinza de accionamiento neumático depende de un suministro de aire comprimido y componentes auxiliares. Cuando se utiliza el vacío como medio para agregar el producto a la pinza, se colocan ventosas como interfaz. El material de esta ventosa debe ser atóxico, ya que es el componente que estará en contacto directo con el producto.
PROYECTO
El diseño de la pinza normalmente comienza desde cero, excepto para las soluciones estándar o existentes. En el caso de una garra exclusiva, el modelo 3D, como la Figura 2 , es parte de una idea o prototipo .
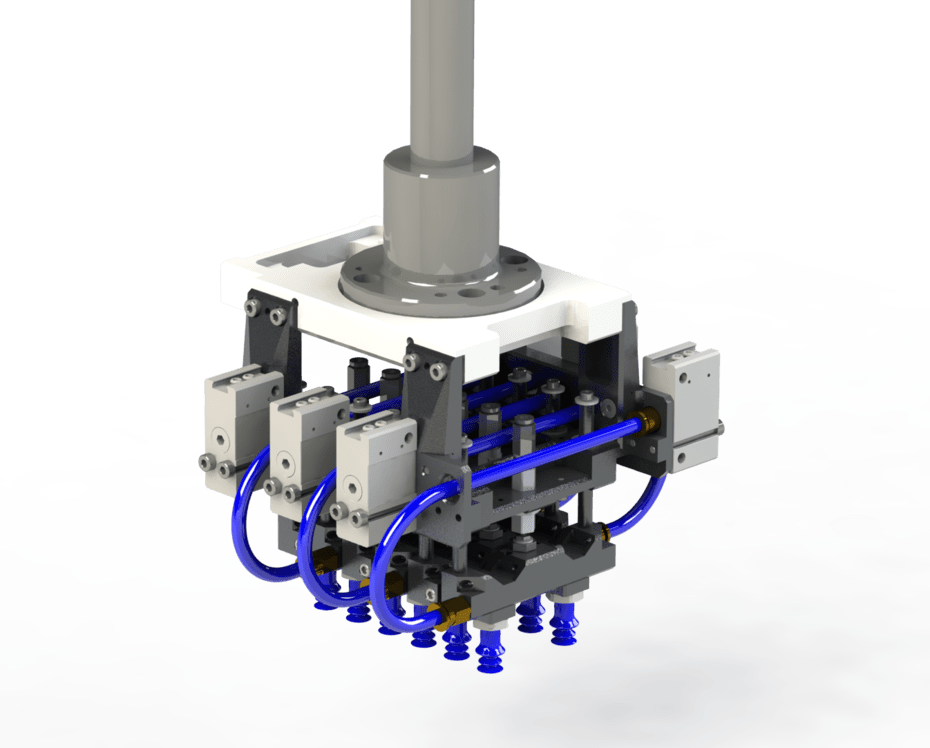
Figura 2 - Control OEE de una celda robótica
Para agarres complejos que tienen altos costos de fabricación o piezas, se recomienda un anteproyecto o un prototipo antes del diseño final (ejemplo Figura 3 ) que puede probar físicamente en un modelo más simple con componentes básicos (menos preocupación por detalles como materiales, acabado, marca de componentes, etc.).
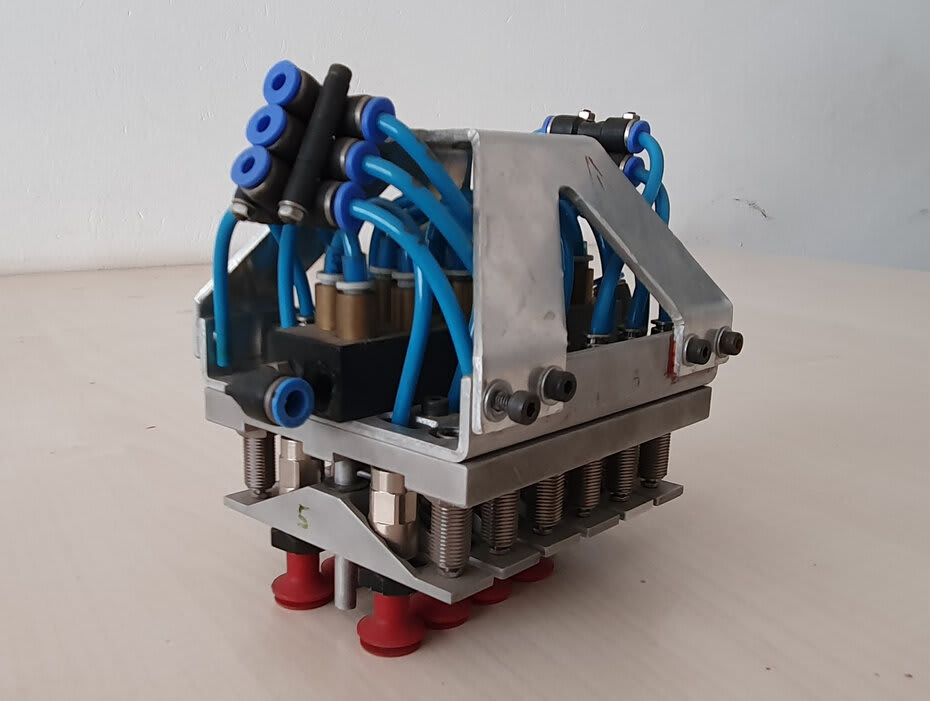
Figura 3 Control OEE de una celda robótica
La construcción definitiva de una pinza para manipulación con robots requiere rigidez estructural y sujeción precisa para asegurar que durante el trabajo productivo no se desmonte, ya que sufrirá esfuerzos repetitivos constantes .
VARIABLES
Los productos manipulados tienen peculiaridades (dimensionales o del propio material) que requieren garras específicas. Es normal utilizar ventosas para productos envasados, pero para productos sin embalaje dependerá de la textura de la cara para el mango.
En el ejemplo de la Figura 4 no era posible utilizar vacío debido a la densidad del producto , además de manipular dos piezas al mismo tiempo (apiladas). Era necesario utilizar el concepto de abrazadera para permitir la manipulación.
La velocidad de la garra influye directamente en el diseño: la tecnología que existe para atrapar un objeto en movimiento y depositarlo en movimiento, sumada a la velocidad de la garra, ralentiza la productividad del robot. Por lo tanto, cuanto más rápida sea la garra, más tiempo le queda al robot.
Uno de los desafíos es absorber la variación dimensional, ser rápido y no dañar el producto (producto quebradizo). En tales casos, hay revisiones de la garra o incluso un cambio de concepto , si su desempeño perturba el sistema en su conjunto.
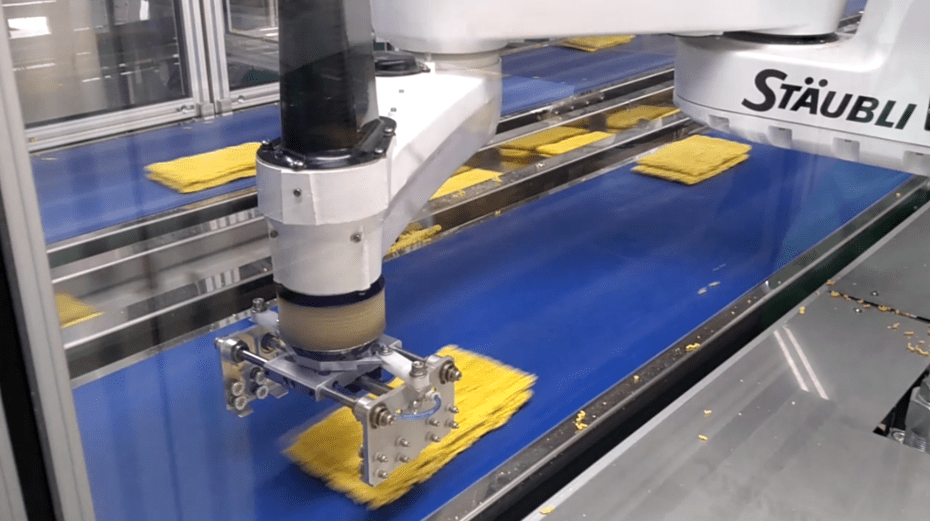
Figura 4 - Control OEE de una celda robótica
SOLUCIÓN
SNEF ejecuta proyectos que involucran todas las etapas del proceso industrial. Son soluciones completas y a medida , utilizando tecnologías ya integradas en el concepto Industria 4.0 para las necesidades locales de su empresa. La automatización y la robotización son garantía de la salud y el bienestar de sus empleados y permiten que la producción no se detenga debido a la pandemia.
 Soluciones
Soluciones26.06.2024
¡Descubre cómo Snef puede ayudarlo a mejorar la eficiencia de su planta!
¡Estamos emocionados de anunciar la adquisición de nuevas máquinas y equipos para mejorar la eficiencia de la planta de nuestros clientes! Este proceso es crucial para garantizar el cumplimiento y la eficiencia de una...
- Soluciones
10.04.2023
Proyectos de drenaje en parques fotovoltaicos.
Con la creciente inversión en proyectos e implementación de parques solares para la diversificación de matrices de energía, los desafíos también crecen. Los desafíos están en relación...
- Soluciones
10.02.2021
DELITOS CIBERNÉTICOS: UN MUNDO SITIADO
Para evitar el ciberdelito, las empresas deben estructurar sus áreas de seguridad de la información reforzando el monitoreo de la seguridad y la red.